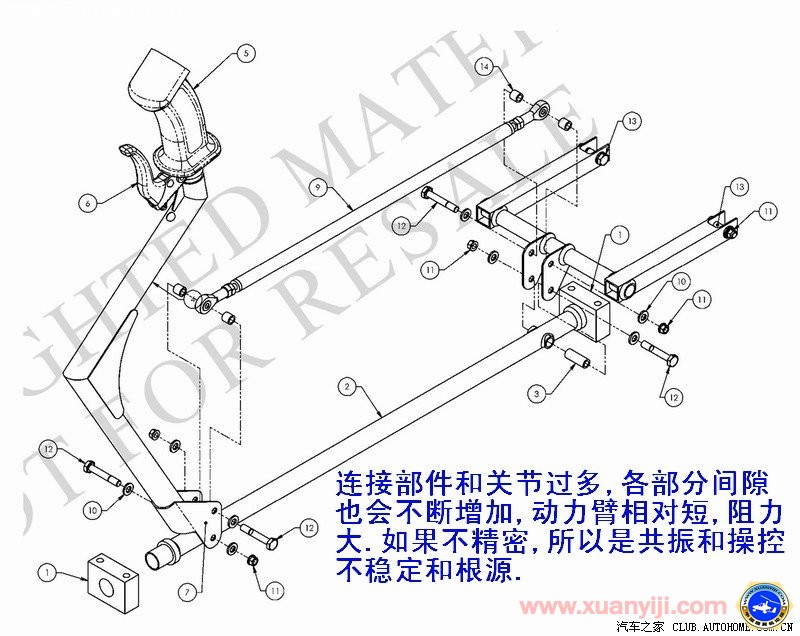
通过几天的了解,从多种图片上发现自旋翼机操纵杆常用的设计多为双轴杆连动式,由于是多点连接,如果不够精密,势必有间隙,连接点越多间隙就越大,而且固定件和连接杆件的强度和厚度都是增加自重的因素,且动力臂相对短,这样就会形成操纵阻力增大振动和操纵不稳定的结果。当细观察蝴蝶机的操纵杆时发现它的设计简单(更容易DIY制作),连接点最少,振动定会减少,动力臂长,减少了自重量,操控会更为轻松和稳定,个人观点,请前辈指正。
常用的方案:
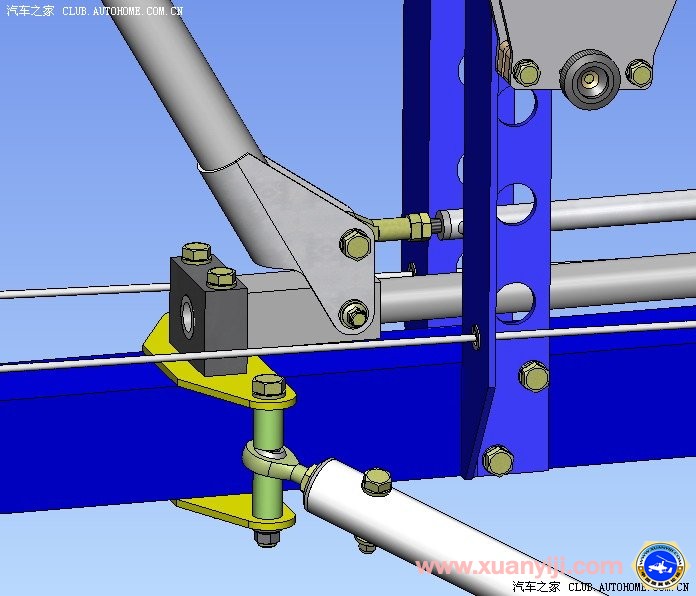
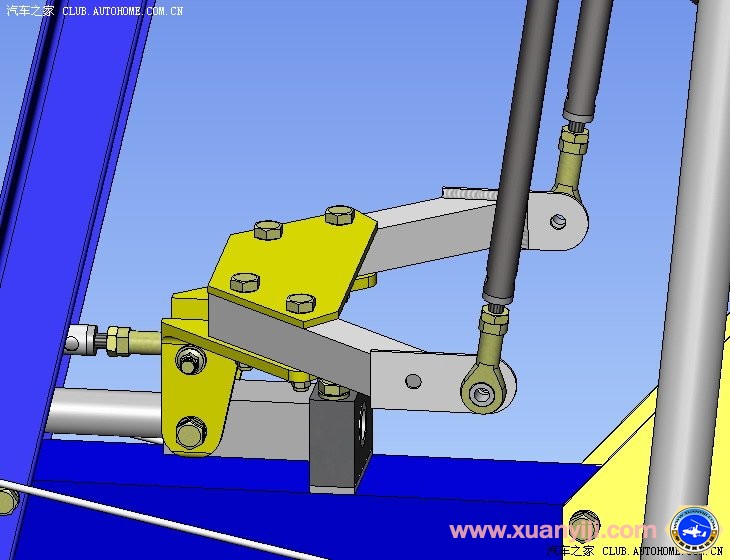
看一下蝴蝶机的设计方案


[此贴子已经被作者于2008-6-22 15:42:11编辑过]
hhe留言说
<p>针对这个旋翼的操作我有几个问题:</p><p>1)对于旋翼的角度(旋转轴角度),有没有什么锁紧机构,难道是完全由操作杆来控制。我所当心的是旋翼受气流影响时,主旋转轴会有偏转的趋势,难道需要用手抓紧操纵杆,来抵抗这种偏转吗。</p><p>2)是不是应该达到的设计目标是:操作时人手的控制能够被旋翼接收,而旋翼不会主动偏转并反作用于操纵杆。</p><p>如果旋翼本身具有自我稳定的功能,即旋翼在不受操控力的状态下能够根据气流和受力自动调整旋翼倾角,使飞机稳定,那就不需要这种功能了。</p><p>3)操纵的舒适性由整个传递机构实现,什么样的操作感是好的?(就是说操作杆的运动引起的旋翼倾角的变化,什么样的响应,会给人感觉操控舒适)</p>