地面机动性主要帮助训练在飞行路线和地面时的注意力,控制旋翼机并观察临近的飞行器。在每个训练以前,要完成空转检查保证训练区域与其他交通不相冲突。
矩形飞行课程是一个旋翼机在地面上一个四边距离相等的矩形区域的机动性训练。[图 20-10]在训练中,海拔和空速要保持恒定。矩形飞行课程帮助训练朝向或者远离已定轨迹的平行线的认识。这有助于认识在各种各样的机场交通形式的飞行跑道。
在这种训练中,选择一个方形或者矩形场地,或者一个以线或者路为边界四边界限的,每边长大约为 1 英里。场地要远离气态空中交通路线。旋翼机飞行高度大约 600 到 1000 英尺,大概是一般航线的高度。旋翼机飞行要在一个平面并且飞行相同的距离大约 0.25 到 0.5 英里,从边界线开始,但不是在边界线上。最好是使旋翼机的飞行路线正好在边界线外刚好能够观测到边界线的地方。飞行员可以坐在旋翼机座位的位置上正好能够看到边界线,无论是左飞或者右飞的课程。不管是左飞还是右飞,飞行场地距离场地边界距离相等。每个转弯都要在旋翼机垂直于场地边界时进行。倾斜角度一般不超过 30°。
尽管矩形飞行课程可以从任何一个方向开始,这里假设从顺风向开始。当旋翼机达到场地边界,可以开始转向侧风方向。因为尾部处在顺风状态,旋翼机速度增加(位置 1)。在转向侧风方向后,等效于基础行程处在交通路线,侧风使旋翼机远离边界线。为抵消这个影响,旋翼机需要适当加速进行一个相关的陡转(位置 2)。
随着转弯前进,尾部风减小,速度减小。因此,倾斜转弯角度和转弯速度需要逐渐减小保证完成转弯,侧风路线轨迹延伸到距离场地相同距离。完成转弯后,旋翼机要水平并与顺风拐弯处平行。因为侧风将旋翼机推向远离场地,必须采取适当措施通过飞行微调修正漂移。因此,侧风的转向前进方向要大于 90°(位置 3)。如果转弯措施好的话,场地边界又出现在 0.25 或者 0.5 英里处。在侧风的行程,必须有侧风影响修正,来保证距离边界相同的距离。
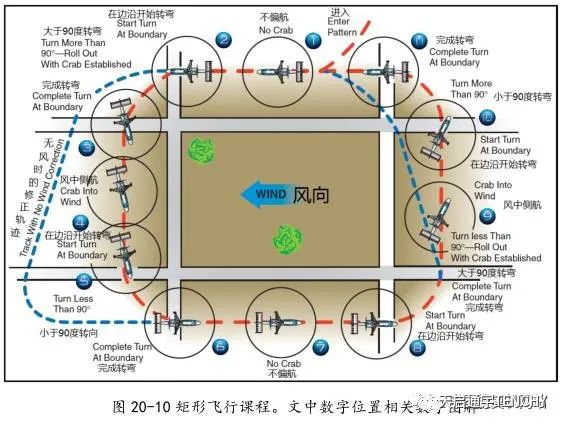
随着接近下一个边界(位置 5),准备转弯到逆风行程。由于侧风影响修正角度的存在和前往场地逆风的行程,下一个弯需要转一个小于 90°。从侧风转向逆风,导致速度在转弯时减小,倾斜转弯角度首先要中等并随着转弯过程逐渐减小。完成转弯后,横向侧移后,旋翼机水平并与场地边界拐角平行因为旋翼机的经度轴与场地边界平行(位置 6)。距离场地边界的距离与另外一侧要相同。
在逆风行程,由于逆风的影响,使旋翼机速度减小(位置 7)。因此,在转弯到下一个行程时会在低速下进行,相关倾斜转弯角度小(位置 8)。在转弯过程中,随着逆风影响的逐渐减小逐渐增大倾斜转弯角度,速度增大。在转弯和完成转弯后进入的新行程,风将旋翼机吹向场地边界。为了补偿风的影响,转弯角度小于 90°(位置 9)。
再次,旋翼机转弯完成后达到水平状态,旋翼机前端稍微偏离场地并进行适当的风向影响补偿。跟其他行程相同,旋翼机必须距场地边界相同的距离并且保持相同的姿态。保持侧风行程直到树蜂行程边界(位置 10)。同样你要注意风的影响和转弯范围。因为在侧风行程中风向影响补偿的存在,转弯角度需要大于90°来保证旋翼机平行于顺风边界。转弯的倾斜转弯角度保持中等,随着转弯的进程逐渐增大的陡转角度。通过侧移保证旋翼机水平并且与边界线平行。
如果在逆风和顺风的行程中,旋翼机不会出现飘移情况。实际上,很难出现风向和场地边界线正好平行的情况。这就需要在每个行程当中都需要适当的角度微调。在转弯时,对空速、漂移和转弯范围的补偿是非常重要的。当风在旋翼机尾部时,转弯速度快,角度陡峭。当风在旋翼机头部时,转弯速度要小,角度小。这种技术在机场交通中同样适用。
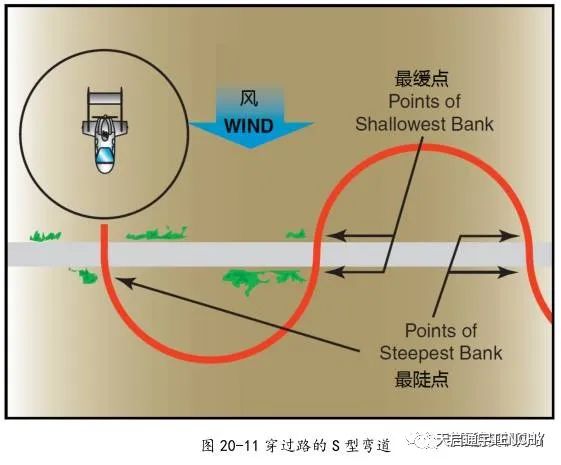
另外一个训练是 S 型飞行,帮助训练纠正转弯时风向引起的漂移。这种弯道需要左转和右转。这种跑道,无论是道路、铁轨或者栅栏,都应该有相当长的距离并且尽量扩展到与风向垂直。
S 型训练是飞行员在某参考线上的异侧,飞过两个规格相同的半圆形[图20-11],这种训练的飞行高度一般距离地形 600 到 1000 英尺。S 型飞行可以从任何一点开始,尽量在初期训练中从顺风向开始。顺风向开始是 S 型训练中转弯角度最陡峭的部分。下面详述基于参考线垂直于风向并且由顺风向开始训练。
旋翼机穿过参考线,立刻进行一个倾斜转弯。由于旋翼机与风向相同并且速度是最快的,所以最初转弯是在整个训练中最陡峭的。逐渐减小转弯角度,达到飞行轨迹成一个半圆。随着半圆形完成,旋翼机垂直穿过参考线并开始逆风飞行。立刻进行一个转弯来继续完成 S 型飞行的下半部分。由于旋翼机逆风飞行,这个转弯(即旋翼机刚刚穿过参考线时的转弯)是训练中转弯角度最小的。逐渐增大转弯角度,使飞行轨迹成为一个与参考线轨迹形成的半圆规格大小相同的半圆。在这个转弯过程中,转弯角度最大可以在旋翼机最接近顺风时获得。当 S 型飞行完成时,旋翼机正好垂直于参考线顺风飞行。
概括来说,在每个点的转弯倾斜角度取决于飞行速度。飞行速度越快,转弯倾斜角度越陡峭,飞行速度越慢,转弯倾斜角度越平缓。换言之,旋翼机与顺风向越接近,转弯倾斜角度越陡峭,旋翼机与逆风向越接近,转弯倾斜角度越平缓。为了在训练过程中改变转弯倾斜角度克服漂移来保持适当的飞行半径,除了在顺风或者逆风或者无风的情况下旋翼机必须在飞行时与地面轨迹保持一定角度(偏航)。在一般思维中,旋翼机前端或者尾部的轴应该与轨迹所在的点相切。实际情况并不是这样。旋翼机在参考线逆风侧的转弯(风吹来的方向一侧),旋翼机前端偏航角向圆外部偏。在参考线顺风侧的转弯(参考线的另一侧),旋翼机前端偏航角向圆的内部偏。在这两种情况下,旋翼机和直线飞行时一样都是朝风吹来的方向偏航。偏航角度取决于风速和旋翼机与风向位置夹角。风越强,在任何给定位置的给定半径下的偏航角越大。旋翼机与侧风越接近,偏航角越大。最大偏航角应该在每个圆离参考线最远的那个点。
S 型转弯没有标准的半径,因为这个半径取决于旋翼机速度、风速和最初转弯倾斜角度。
圆形飞行要求以接近最大转弯倾斜角度 40°绕选定点以恒定半径飞行,同时保持固定姿态[图 20-12]。其目的与其它飞行训练相同,在关注飞行路线和参考标志时,训练下意识的飞行器控制,同时注意临近的空中交通。
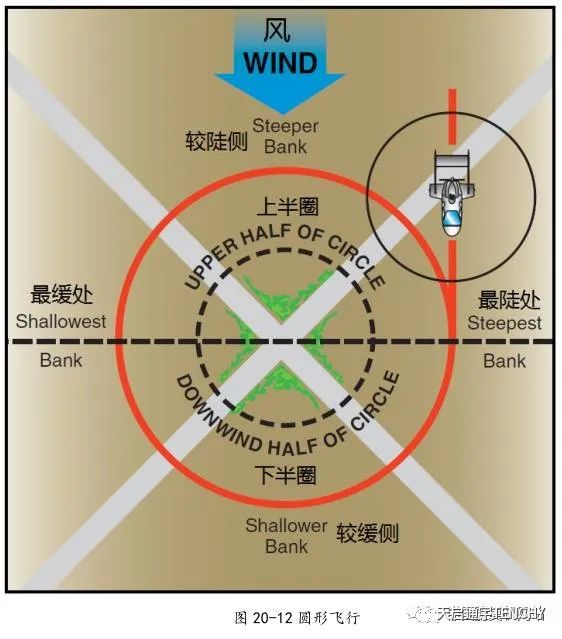
在 S 型飞行中的偏移修正因素和原则在圆形飞行中同样适用。在圆形飞行训练中,要保证绕一个点以恒定半径飞行,在风的影响下,需要持续改变转弯倾斜角度和风向影响修正角度。旋翼机飞行方向与顺风向最接近时,飞行速度最大,转弯倾斜角度最陡峭,较快的转弯速率需要适当的风向影响补偿角度。旋翼机飞行方向与逆风向最接近时,飞行速度最小,转弯倾斜角度最平缓,较慢的转弯速率需要适当的风向影响补偿角度。在圆形飞行中,转弯倾斜角度和转弯速率与旋翼机速度近似成比例关系。
圆形飞行的选定点要突出容易辨识,并且不能太小。孤立的树、十字路口或者类似的路标是常见的选定点。选定点要远离生物群落、家畜、人群等以防止看不见选定点或者对其他人构成威胁。由于圆形飞行在地平面以上 600 到 1000 英尺飞行,这个区域要提供可应急得着陆点以供必要时使用。
进入圆形训练区域,旋翼机在选定点一侧顺风飞行,并按要求等半径转弯。在有风存在的情况下,最初的转弯倾斜角度很快,当旋翼机顺风时所在点的转弯倾斜角度最大。在圆形飞行中,旋翼机顺风飞行时的转弯倾斜角度最大。因此,如果转弯倾斜角度要求 40°,旋翼机在距选定点确定距离的最初的转弯倾斜角度 40°。随后,转弯倾斜角度助教较小知道旋翼机到正好逆风状态。此后,转弯倾斜角度逐渐增大直到再一次到出发点获得最大倾斜转弯角度。
同 S 型飞行一样,圆形飞行也需要旋翼机根据风向保持一定的偏航角。在顺风的半圆时,旋翼机前端逐渐向圆的内部偏;在逆风的半圆,旋翼机前端逐渐向圆的外部偏。圆形飞行的顺风半圆和 S 型飞行的顺风半圆类似,圆形飞行的逆风半圆和 S 型飞行的逆风半圆类似。
当你有一定经验并理解圆形飞行的风向偏移影响、转弯倾斜角度和风向修正角度时,你可以从任何一点开始绕选定点飞行。在这种飞行中,转弯半径必须仔细选择,考虑的风速和空速,并不需要额外的转弯倾斜角度来保持飞行轨迹。
飞行训练常见错误:
1、错误的弯道进入技术。
2、无计划、方位,或者注意力分散。
3、不协调的飞行控制。
4、不适当的风向偏移修正。
5、S 型飞行时飞行轨迹不对称。
6、不能保持飞行姿态或空速。
7、选定场地周围没有合适的应急着陆场地。
旋翼机低速飞行训练的目的是掌握旋翼机低速下的飞行控制,同时了解负载、姿态角、空速和高度控制及它们之间的相关关系。
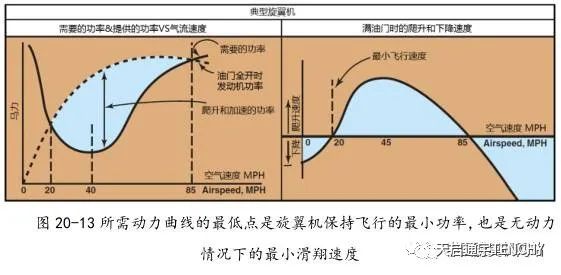
同固定翼飞机一样,发动机可以提供不同的功率,特有的动力系统使旋翼机达到不同的飞行速度,。它们的关系绘制成曲线图[图 20-13]。所需动力曲线的最低点描述了旋翼机水平飞行的最小功率。如果速度需要大一些,或者小一些,都需要更多动力。在旋翼机低速飞行训练时,你在操纵旋翼机动力系统以水平飞行的最小功率飞行领域。这通常被称为曲线的最低点或者曲线临界点。在这种飞行速度下,随着旋翼机斜度逐渐增加减小旋翼机速度,所需保持水平飞行功率越来越大。当动力系统达到最大功率时,旋翼机在不下降的情况下达到最小水平飞行速度。因为没有更多的动力来提供加速度,从最小水平飞行速度恢复需要降低旋翼机前端和海拔恢复空速。因此,低速飞行训练要在能够安全海拔恢复空速的海拔下进行。旋翼机在动力曲线以下或者临近点飞行或者着陆是非常危险的。低速飞行必须要有充足的油料供应、足够的海拔恢复空速、和最初的爬升,并要保持与地面联系。
旋翼机低速飞行通常是指在速度 5 到 10 m.p.h 的最小平面飞行速度。在低速飞行的时,对输入的控制要缓慢平稳,防止在姿态角改变时,速度迅速降低产生的巨大的拉力。另外,转弯角度必须很小。为防止在转弯时海拔降低,必须提高动力。由于随着功率增大产生的高速滑流速度,低速飞行的方向控制也非常重要。
恢复巡航飞行速度主要靠降低旋翼机前端和增加动力。当达到要求速度后,减小动力到正常巡航动力状态。
常见错误:
1、错误的进入技术。
2、不能保持适当的风速。
3、航向和海拔确定时过多地航向和海拔变化。
4、转弯角度过于陡峭。
5、粗糙或不协调的控制技术。
旋翼机在低速前飞时可能需要高速下降。这种操作是在高速下降的要求下刻意进行的,并且在有无动力都可以进行。无意识的高速下降在失去控制或者保持适当空速失败的情况下也会发生。在动力飞行时,如果旋翼机以低于最小水平飞行速度飞行时,就是在满功率工作的情况下也会下降。进一步减小空速,会增大下降速度。因为旋翼机有很高的重量推进比率,这种操作会造成很大的姿态斜度。要恢复到原来状态,可以缓慢降低旋翼机前端使降低海拔的同时增大空速。
在操纵无动力旋翼机滑行时,速度降低到最佳滑行速度以下时同样会导致高速下降。随着空速增加,下降速率增加,当前飞速度为 0 时达到最大下降速率。没有动力的低空速,尾部表面的气流很小,方向舵的效率大大降低。必须对方向舵踏板极力控制才能有效控制偏航。要想恢复到空速状态,可能的话打开动力,或者降低旋翼机前端使旋翼机加速到合适的空速。这表明在无动力着陆的情况下保持适当滑行速度的重要性。通过抬高旋翼机前端延长滑行距离只会导致高速下降而前飞速度过低,没有足够的距离选择着陆场地。
常见错误:
1、错误的操作技术。
2、不能正确认识高速下降。
3、不适当的速度恢复控制技术应用。
4、在最小恢复海拔以下进行恢复。
内容转自: 天启通宇TENCHY