概述:自动飞行系统有两个子系统(FMGS、FAC),这些子系统包括计算机、执行机构、控制单元和相关外围设备。自动驾驶和自动推力功能,没有伺服执行机构。
SUB SYS1:FMGS:执行自动驾驶、飞行指引、自动油门,飞行管理(导航、性能、显示处理)。
SUB SYS2:FAC:执行偏航阻尼、方向舵行程限制、飞行包线监控和机动速度计算功能。另外FAC 1还有AFS 的自检功能。
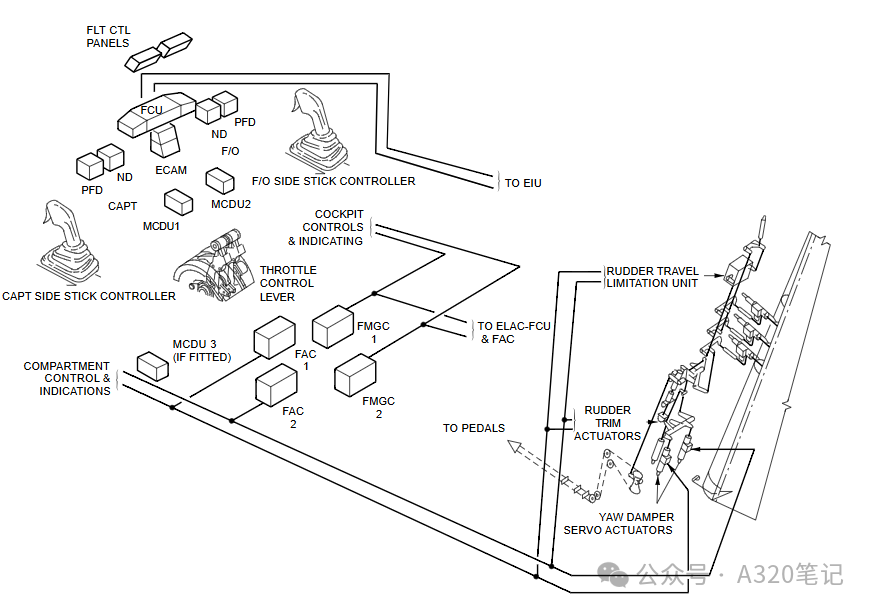
AFS/FMS系统的核心控制组件有四台计算机:两个FAC和两个FMGC(每个有8个MCU)。FAC相关的执行机构直接连接到飞控装置。系统总线传输ARINC 429的数字信息,用于:
– 计算机之间的互连;
– 计算机、控制单元和传感器之间的连接。
FMGS发送自动驾驶功能的舵面偏转指令到:
– ELAC 1和ELAC 2用于俯仰和滚转指令;
– FAC 1和FAC 2用于偏航指令。
FMGS发送自动推力功能的推力指令到:
– ECU 1 /EEC 1(1发推力指令);
– ECU 2 /EEC 2(2发推力指令)。
当自动驾驶和自动油门接通时,侧杆和推力杆不会作动。
控制和指示:
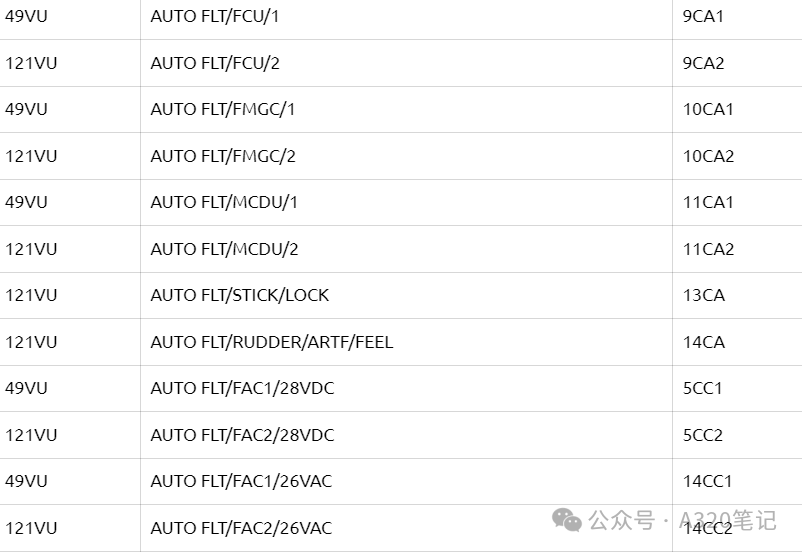
AFS系统跳开关列表
控制:
-FLT CTL面板23VU和24VU上的FAC电门;
-FCU;
-MCDU;
-接管和优先按钮;
-A/THR断开按钮。
指示和警告:
-PFD;
-ND;
-ECAM;
-RUD TRIM指示器;
-MASTER WARN,MASTER CAUT和AUTO LAND灯。
子系统详述:
1:FAC执行以下功能:
– 偏航阻尼;
– 方向舵配平;
– 方向舵行程限制;
– 监测飞行包线和计算机动速度;
– 使用偏航阻尼器和方向舵配平反馈实现偏航自动驾驶命令。
此外,FAC 1执行AFS的BITE功能。
工作原理:FAC是一种dual-dual系统,用于偏航阻尼、方向舵配平和方向舵行程功能。两部FAC,FAC 1和FAC 2可以通过头顶板上的FAC 1和FAC 2电门同时接通。一次只有一个系统处于工作状态:FAC 1具有优先权,FAC 2处于备份状态,并同步于FAC 1指令。在FAC 1关闭或故障的情况下,自动切换到FAC 2。每个功能(偏航阻尼、方向舵配平、RTL)都可以实现部分切换。当飞机电网接通时,以下功能将独立于FAC按钮启用:
– 监测飞行包线;
– 计算机动速度。
FMGC和PFD以以下方式接收这些信息信号:
– FMGC 1和Capt PFD通常使用FAC 1的数据;
– FMGC 2和F/O PFD通常使用FAC 2的数据;
在故障的情况下,FMGC和PFD使用正在工作FAC的数据。
偏航阻尼功能提供:
-人工偏航稳定。
ELAC计算相应数据并通过偏航阻尼器(FAC)的伺服环路将其传输到方向舵。
-荷兰滚阻尼的备用法则(当ELAC不再计算正常偏航稳定时)。
-荷兰滚阻尼(包括转弯协调),当自动驾驶仅在巡航状态下接通时。
-当自动驾驶接通时,发动机的失效恢复(ELAC在人工飞行中提供此功能)。
方向舵配平功能提供:
-通过配平电门人工控制。
此外,ELAC计算方向舵偏转的指令信号(正常偏航阻尼法则,包括发动机故障恢复),在人工飞行中由配平子系统执行。方向舵配平的重置。
-自动控制(自动驾驶接通)。
方向舵行程限制:根据速度限制方向舵偏转行程。
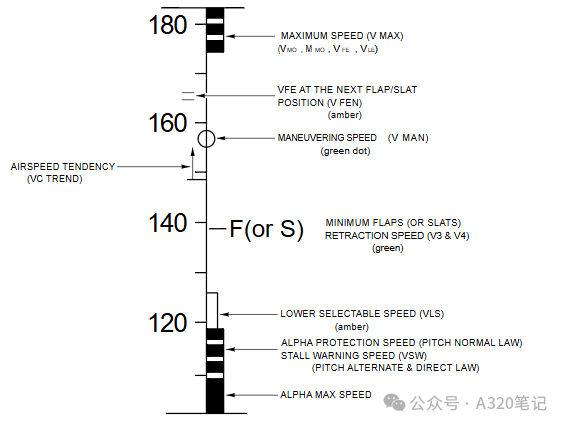
飞行包线监控和计算机动速度:为PFD提供以下数据:
– 失速警告速度(VSW);
– 最低可选择速度(VLS);
– 最大速度(V MAX);
– 最大操作速度(V MAX OP);
– VC TREND;
– 机动速度(V MAN);
– 最小襟翼收上速度(V3);
– 最小缝翼收上速度(V4);
– V FEN;
– V MAX和VLS用于FMGC的AP/FD和A/THR功能的速度限制;
– FAC计算A/THR功能的α模式激活条件(在风切变情况下的迎角保护)。
风切变检测(可选);
低能量检测;
系统的自检功能:FAC 1执行整个AFS/FMS的自检功能。
2:FMGS执行以下功能:
-自动驾驶(AP);
-飞行指引(FD);
-自动推力(A/THR);
-飞行管理(导航、性能和显示处理)。
工作原理:FMGS与FAC一样,均是DUAL-DUAL系统,用于自动驾驶和自动推力功能。在巡航模式下,只能接通一部自动驾驶。在ILS进近模式时,两部自动驾驶仪(通过FCU上的AP1和AP2按钮接通)都可以接通。AP1优先,AP2备份(ELAC和FAC优先使用AP1指令,在AP1断开时切换到AP2指令)。 FCU上的单个A/THR电门可以接通自动推力功能。两个A/THR电门始终可以同时接通,但只有一个(A/THR 1或A/THR 2)在工作状态,具体取决于AP和FD的接通状态。
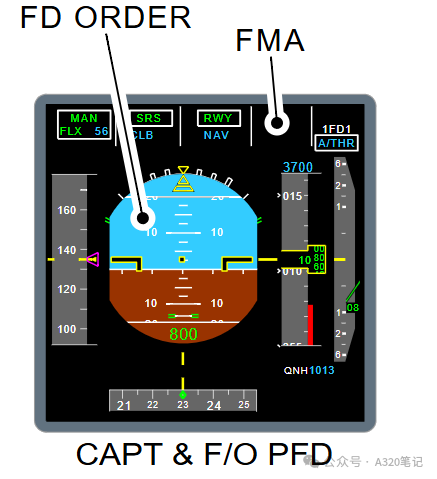
当飞机电网通电时,飞行指引(FD)处于工作状态。CAPT和F/O EFIS控制部分上的相关FD电门点亮。FMGC 1正常驱动机长侧PFD上的FD符号,FMGC 2通常驱动副驾驶PFD上的FD符号。如果一台FMGC发生故障,剩余的FMGC将驱动两个PFD上的FD符号。
当飞机电网通电时,飞行管理系统可用。FMGC通常以双模式工作。两台FMGC同时执行相同的功能,并使用MCDU 1或2上的机组人工输入。飞行管理功能通常使用相关侧的系统输入(1或2)。从系统在主系统上进行同步,以初始化飞行计划、修改和排序、性能模式、引导模式或无线电导航。将结果进行比较,如果存在差异,MCDU将显示(位置、重量、目标速度)。如果无法维持双模式(例如:不兼容的数据库…),两个FMGC将各自恢复到独立模式,即每个FMGC控制其对应侧的MCDU。FMGC之间不传输任何信息,因此无法执行同步或比较。如果FMGC故障,另一台FMGC将独立控制MCDU 1和2,并向两台ND提供相同的数据。所有飞行管理功能均可通过MCDU 1或2使用。
自动驾驶:执行以下模式:
巡航模式:
垂直速度(V/S);
飞行路径角(FPA);
高度保持(ALT);
高度捕获(ALT);
OP CLB;
爬升(CLB);
OP DES;
下降(DES);
加速(EXP)。
横向模式:
航向(HDG);
航迹(TRK);
NAV。
起飞/复飞/进近模式:
自动推力功能执行以下模式:
速度:捕获和保持(SPD);
马赫数:捕获和保持(MACH);
推力:捕获和保持推力限制(CLB、MCT或TO/GA);
减速:在降落阶段应用最小推力(IDLE)。
飞行管理(FMS):
飞行计划:FMGC允许通过MCDU 1或2选择飞行计划,可以通过公司航线号或起降机场定义。系统优化飞行纵向剖面,并在没有公司航线时手动输入数据。
横向导航:
初始化ADIRS;
确定飞机位置;
跟踪飞行计划;
选择导航设备(手动或自动)。
性能计算和纵向导航:
计算最佳速度和特征速度;
计算飞行计划中的预测,考虑各种约束;
跟踪纵向飞行剖面;
各种补充性能计算。
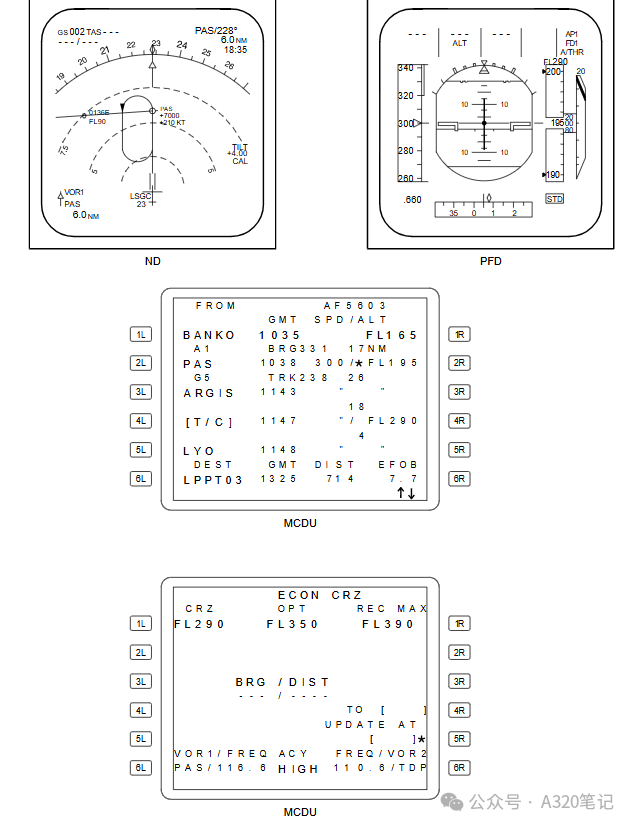
显示管理:
在MCDU上;
在ND上;
在PFD上。